
Designing Optimal Mechanisms According to the Application
The most important things for a robot arm are its shape and operation performance suited to its purpose.
In addition, other elements such as easy assembly, maintainability, cost, forces applied to the arm and the amount of deformation of the arm also need to be taken into consideration.
Some of these elements conflict with each other.
For example, if operation performance is improved too much, the cost will become too high.
Therefore, we design robot arms in which all elements are optimally balanced by utilizing our numerical analysis technologies including structural analysis (Finite Element Method, FEM) and motion simulation using a 3D model.
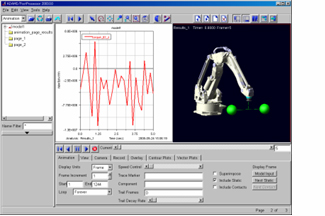
Motion simulation using a 3D model
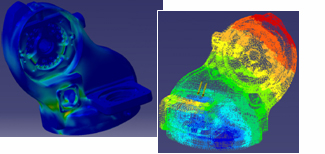
Stress/deformation analysis of a robot arm



