| |
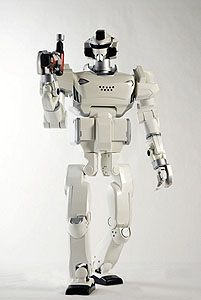
Tokyo, June 21, 2007 – Kawasaki Heavy Industries, Ltd., Kawada Industries, Inc. and the National Institute of Advanced Industrial Science and Technology (AIST) announced today that they have jointly developed the HRP-3 Promet Mk-II, a next-generation humanoid robot designed to operate in adverse environments. It was developed under a five-year project launched in 2002 by the New Energy and Industrial Technology Development Organization (NEDO) to develop a humanoid robot with skills that can be employed in the real world.
Kawada Industries headed up hardware development on the project while the Humanoid Research Group of AIST’s Intelligent Systems Research Institute developed the software technology and Kawasaki developed the remote control technology.
| · |
The HRP-3 is 160 cm tall and weighs 68 kg, including batteries. It has 42 degrees of freedom (DOF), including two in its waist. That is 12 DOF more than its predecessor. The robot has 13 DOF in each arm part (7 DOF in each arm and 6 DOF in each hand) that enables the robot to carry out more complex tasks. |
| · |
Its dust-proof, water-resistant joints and electrical system as well as a cooling system to release heat generated inside the robot enable it to work under harsh and inclement conditions such as outdoor construction sites. |
| · |
Its new extremely efficient high-output actuator designed for optimal walking performance extends the humanoid robot’s period of continuous stepping endurance from 60 to 120 minutes. |
| · |
The robot is completely dustproof, water-resistant, able to walk on slippery surfaces and has fully coordinated arm and leg motion. Kawasaki newly developed the autonomous/remote hybrid control technology to expand the range of tasks it can perform and the remote-control cockpit system to provide exactly what is needed to operate the humanoid robot. |
|